Tracking Research Progress
Multi-Agent Path Finding (MAPF) is a combinatorial problem that asks us to compute collision-free paths for teams of cooperative agents. Many works appear on this topic each year, and a large number of substantial advancements and improvements have been reported. Yet measuring overall progress in MAPF is difficult: there are many potential competitors, and the computational burden for comprehensive experimentation is prohibitively large. Moreover, detailed data from past experimentation is usually unavailable.
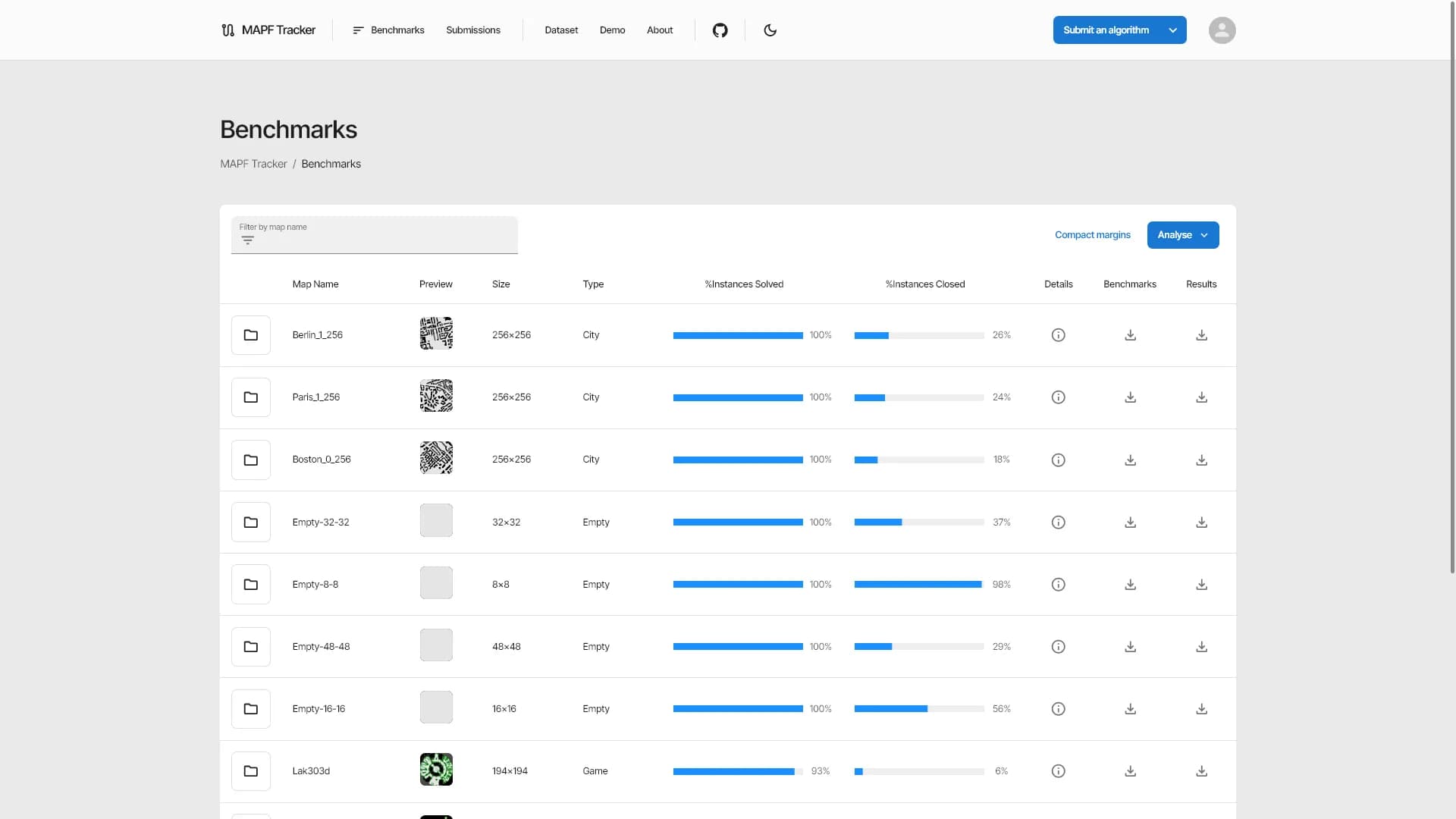
This online platform introduces a set of methodological and visualisation tools which can help the community establish clear indicators for state-of-the-art MAPF performance and which can facilitate large-scale comparisons between MAPF solvers. Our objectives are to lower the barrier of entry for new researchers and to further promote the study of MAPF.
Advisors
Team
Bojie Shen
PhD 2023
Zhe Chen
PhD candidate
Monash University
Will Holdsworth
Ethel Lim
Kevin Zheng
Software Engineer
Monash University